Refrence Math Formula
Relu Activation Function
卷积神经网络选择Relu函数作为卷基层的激活函数
Two-dimantional Covolution Formula
- 矩阵A,B的行列数分别为$m_a,n_a,m_a,m_b$
- s,t满足$0\le{s}\lt{m_a+m_b-1}, 0\le{t}\lt{n_a+n_b-1}$
此公式可以简写为
Introduction Convelutional Neural Network
Three Lays
- N 为卷积层的数量
- M 为池化层的数量
- K 为全连接层数量
流程:INPUT -> CONVN -> POOLM -> FC*K
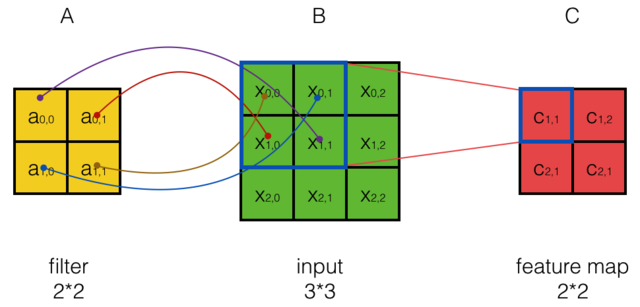
Convelutional Layer
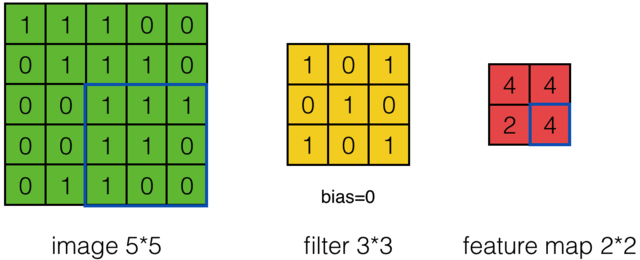
Input Matix,Filter Matrix,Feature Map Matrix
输入矩阵,特征筛选矩阵,输出矩阵(特征映射矩阵)如下:
- $X_{ij}$表示Input矩阵的i行,第j列
- $W_{mn}$表示Filter矩阵的m行,第n列
- $W_{b}$表示Filter矩阵的偏执项
- $a_{ij}$表示Feature Map矩阵的m行,第n列
- $f$为激活函数Relu
- 步幅为1
Calculate Feature Map Matrix’s Width & Height
输出矩阵的高度和宽度计算公式为:
- $W_1$为输入矩阵的宽度,$H_1$为输入矩阵的高度
- $W_1$为Feature Map 矩阵的宽度,$H_1$为Feature Map 矩阵的高度
- $F$为Filter矩阵的宽度
- $P$为Zero Padding的圈数,补0的圈数
- $S$为步幅
- 示例见 [EX01]
Calculate Feature Map Element
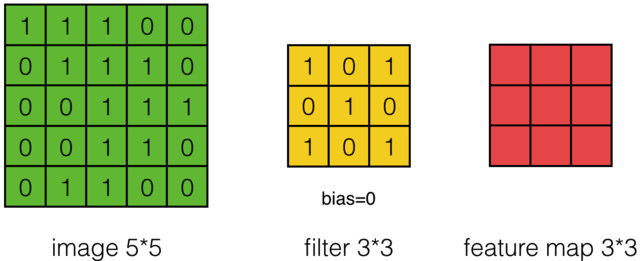
Calculate Feature Map Matrix
卷积和互相关操作是可以转化的,把矩阵A翻转180度,然后再交换A和B的位置(即把B放在左边而把A放在右边。卷积满足交换率,这个操作不会导致结果变化),那么卷积就变成了互相关,得到输出矩阵的公式:
如下图计算示例:
Pooling Layer Calculate
Pooling的层的主要作用是下采样,主要有两种方式Max Pooling 和Mean Pooling
- Max Pooling是取n*n中的U最大值
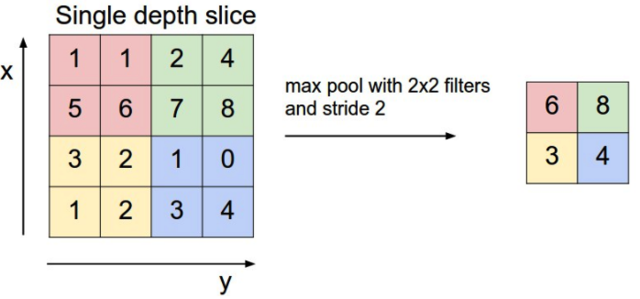
- Mean Pooling是取n*n中的平均值
Full Connection Layer
参考Neural Network
Train Convolutional Neural Network
卷积神经网络训练依旧采用反向传播训练方法 Train Step
- 向前计算每个神经元的输出值$a_j$
- 反向计算每个神经元的误差项$\delta_j$
-
$\delta_j$也成为敏感度,是损失函数$E_d$对神经元加权输入$net_j$的偏导数$\delta_j=\frac{\partial{E_d}}{\partial{net_j}}$
- 计算每个神经元$w_ji$的梯度
-
$w_ji$标示神经元i连接到神经元j的权重,公式为$\frac{\partial{E_d}}{\partial{w_{ji}}}=a_i\delta_j$,$a_i$标示神经元i的输出
- 梯度下降更新每个权重w
Train Convlution Layer
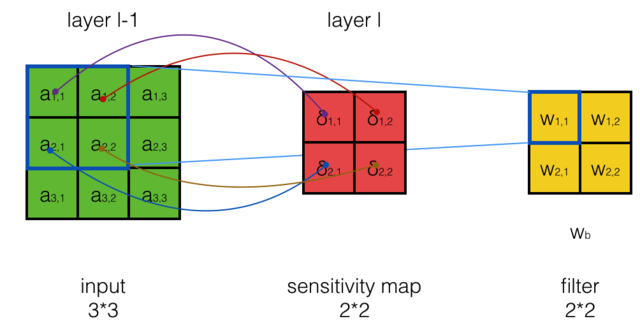
误差传递
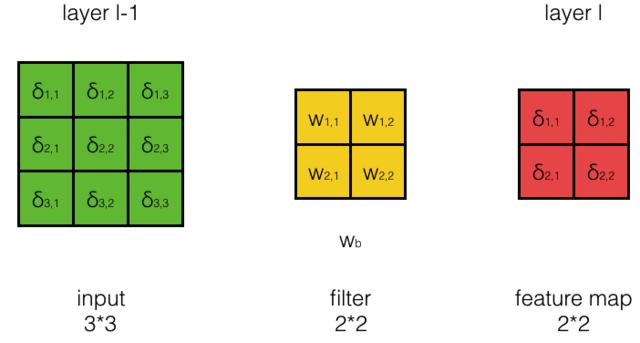
- $\delta^{l-1}_{i,j}$表示第l-1层的第i行,第j列的误差项
- $w_{m,n}$表示Filter 第m行,第n列的权重
- $w_b$表示Filter的偏执项
- $a^{l-1}_{i,j}$表示第l-1层的输出
- $net^{l-1}_{i,j}$表示第l-1层的加权输入
- $net^l$,$W^l$,$a^{l-1}$都是矩阵,conv为卷积操作
Calculate $\mathbf{ \Large { \delta^{l-1}} }$
calculate single element
calculate matrix
- 第d个Filter Metrax产生第i个Feature Map
- l-1 层的每个加权输入$net^{l-1}_{d, i,j}$,影响了l层的所有Feature Map输出,所以计算误差项,要用全导数公式
- 最后将D个sensitivity map 按元素相加
Calculate $\mathbf{ \Large { \frac{\partial{E_d}}{\partial{w_{i,j}}}} }$
Train Pooling Layer
Max Pooling & Mean Pooling 没有需要学习的参数,只需要计算此层误差的传递,而无剃度的下降
Max Pooling
误差只传递到上一层中对应的最大项中 见[EX04]
Mean Pooling
误差项是平均分配到上一个层的所有神经元 可以使用克罗内克积(Kronecker product)计算:
- n 是Pooling Layer的Filter Matrix 的大小
- $\delta^{l-1} $,$\delta^{l}$是误差的矩阵
Reasoning Process
01 Reasonig feature map element $\mathbf{a_{i,j}}$
卷积计算为
如算输出矩阵的a00:
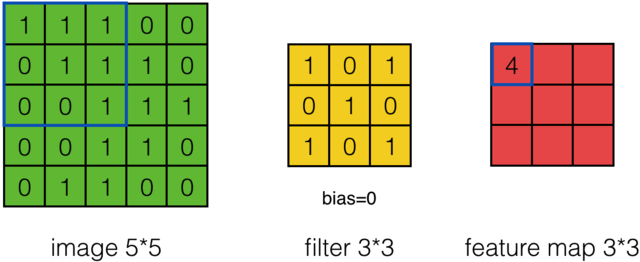
步幅为1是的计算结果如下:
当步幅为2时:
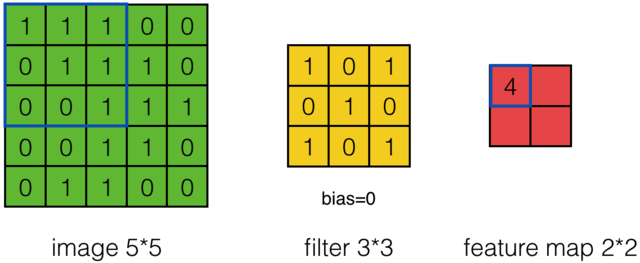
步幅为2时的计算结果如下:
 最后得出的卷积通用公式为:
最后得出的卷积通用公式为:
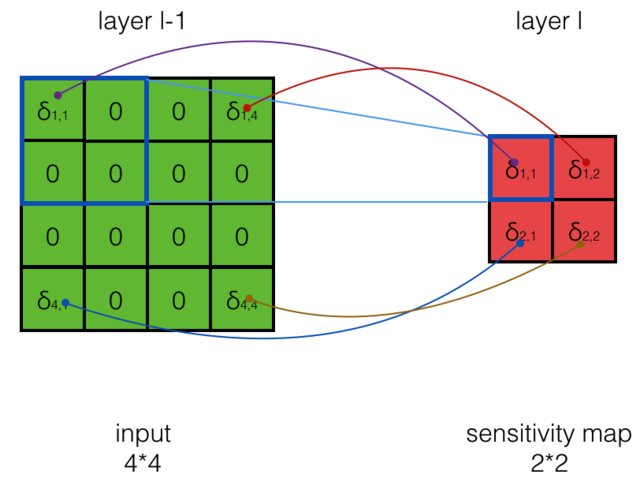
02 Resoning $\mathbf{\delta^{l-1}}$
假设l的每个$\delta^l$都已计算好,计算l-1层的$\delta^{l-1}$
先计算第一项$\frac{\partial{E_d}}{\partial{a^{l-1}_{i,j}}}$
卷积形式:
再计算第二项$\frac{\partial{a^{l-1}{i,j}}}{\partial{net^{l-1}{i,j}}}$
因为:
所以第二项为f的导数
根据第一式和第二式计算
卷积形式:
- $\circ$表是element-wise product,即矩阵的每个元素相乘
- 式中的$\delta^l$,$\delta^{l-1}$,$net^{l-1}$都是矩阵
当Filter Matrix的数量为D时,输出的深度也为D
- 第d个Filter Metrax产生第i个Feature Map
- l-1 层的每个加权输入$net^{l-1}_{d, i,j}$,影响了l层的所有Feature Map输出,所以计算误差项,要用全导数公式
- 最后将D个sensitivity map 按元素相加
03 Resoning $\mathbf{\frac{\partial{E_d}}{\partial{w_b}}}$
推理过程
Example1 :计算$\frac{\partial{E_d}}{\partial{w_{1,1}}}$
- 由于权值共享,$w_{1,1}$对所有的 $net^l_{i,j}$都有影响
- $E_d$是$net_{1,1}^l$,$net_{1,2}^l$,$net_{2,1}$…的函数
- $net_{1,1}^l$,$net_{1,2}^l$,$net_{2,1}$…是$w_{1,1}$的函数
- 根据全导数公式,计算$\frac{\partial{E_d}}{\partial{w_{1,1}}}$就要把每个全导数加起来
Example2 :计算$\frac{\partial{E_d}}{\partial{w_{1,2}}}$
通过$w_{1,2}$和$net_{i,j}^l$的关系,得到:
所以得到通用公式
计算Filter Map Matrix
04 calculate max pool loss
IMAGE
Max Pooling的计算方式
{kind=link}
每个的偏导数为:
所以
非最大值的其他项
05 calcute mean pool loss
推理过程
IMAGE
Mean Pooling 的计算方式为
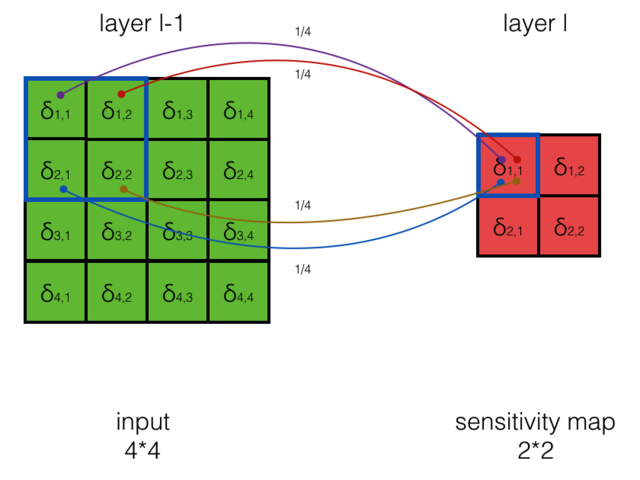{kind=link}
每个的偏导数为:
所以可以计算出:
同样可以计算出其他项:
误差项是平均分配到上一个层的所有神经元
Calculate Example
01 Calculate feature matrix width and height
如输入宽度为5,特征矩阵宽度为3,Zero Paddding的圈数为0,步幅为2,最后计算的输出矩阵宽度为: